汽车的黑匣子是用来记录传感器数据的,这些数据用于重现并确定事故的根本原因。L3 至 L5 级别的自动驾驶汽车对黑匣子记录功能的要求越来越高,而相关监管部门正在制定这类要求,不同国家的要求往往也各不相同。例如,美国机动车辆管理部要求自动驾驶汽车至少保存碰撞事故发生前最后 30 秒的传感器数据。
除了法律要求的所有其他机制之外,自动驾驶汽车还有一种单独的机制:汽车在自动驾驶模式下,与另一辆车、物体或者自然人发生碰撞之前,必须采集并存储至少 30 秒的自主技术传感器数据。该机制应采集自主技术传感器数据并以只读格式进行存储,数据一直保存不变,直至外部设备下载并存储数据,利用这种机制提取出了数据。如果发生了碰撞,自碰撞之日起,数据应保存三年。
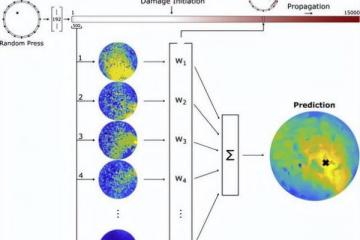
图1:黑匣子记录器中的数据处理结构图
图 1 显示了黑匣子记录器的结构图,其输入是汇集了来自多个传感器的连续数据流。出于成本和安全方面的考虑,有些系统首先对数据进行压缩,然后再加密。传感器数据带宽主要是被图像传感器占用的。一辆自动驾驶汽车会包含多达 12 个图像传感器,其中远程摄像头的分辨率高达 800 万像素,每秒 60 帧。生成的数据流能够达到 20GB/秒。
对于成本敏感的应用,H.265 压缩技术能够将最终比特数减少 50%,从而降低了整体存储需求。H.265/HVEC 是一种有损压缩算法,它去掉了人类视觉系统不太敏感的部分数据。然而,一些人工智能算法可能对这种数据失真很敏感,当算法根据记录再现事故的根本原因时,这种压缩技术可能会导致 AI 算法运行产生失真。因此,一些系统,特别是机器人出租车中使用的系统,倾向于避免使用数据压缩技术,或者使用非常低的压缩比。消费类汽车往往对压缩的使用较为宽容,特别是较低级别的自动驾驶。
为记录事故发生前一段时间的数据,使用了循环缓冲区。循环缓冲区是可以基于 DRAM 或者闪存的内存,要有足够的容量才能满足一定长度缓冲区的存储要求。例如,为了采集事故发生前 30 秒的数据,假设 1GB/秒的未压缩传感器数据速率,那么,循环缓冲区的存储容量应为 30GB。
通常,人们采用闪存来实现循环缓冲区,因为它被设计成在断电时不会丢失数据,而 DRAM 则需要备用电源才能保证在主电池断开连接时收集的数据不会丢失。与闪存技术相关的难点是整体耐久性。举一个极端的例子,一辆机器人出租车 24 小时工作并持续近 5 年,将导致连续运行近 4.5 万小时。假设 1GB/秒持续传感器数据流的极端情况下,那么所要求的耐久性将在 150PB 范围内。以目前的闪存技术而言,要实现这一级别的耐久性确实是很大的挑战,甚至是有些不切实际。
图 1 中循环缓冲区后面的NVM 存储器,则为与事故或者潜在事故相关的 30 秒数据快照提供了长期存储位置。该系统依靠加速度计和 AI 传感器的分析结果来确定什么时候会发生事故或者有可能发生事故。当循环缓冲区中的数据应被写入这一长期 NVM 存储器时,这些传感器会进行标记。这种长期存储器件通常基于闪存,而且与循环缓冲区不同,它的耐久性要求要低得多。
美光系统架构师与我们的一级客户和原始设备制造商密切合作,设计黑匣子等系统级解决方案,以确保以最优的成本、性能和功耗满足最苛刻的应用需求。他们还要确保系统集成商在设计应用程序时,一定要防止任何可能出现的内存故障对数据、人员或者财产造成损害。
凭借 28 年来对汽车市场的持续耕耘,并提供覆盖最全面的汽车内存系列产品,美光当之无愧成为顶级汽车内存供应商。
免责声明:该文章系本站转载,旨在为读者提供更多信息资讯。所涉内容不构成投资、消费建议,仅供读者参考。